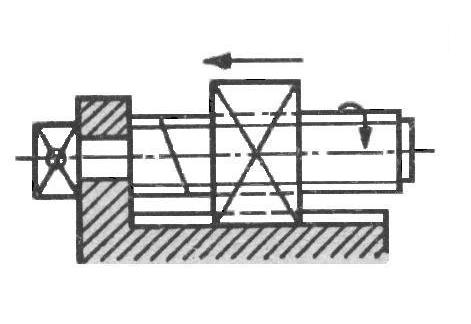
| obrót śruby – przesuw nakrętki |
 |
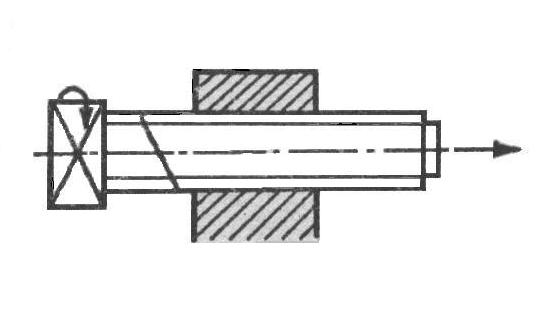
| obrót i przesuw śruby – nakrętka nieruchoma |
 |
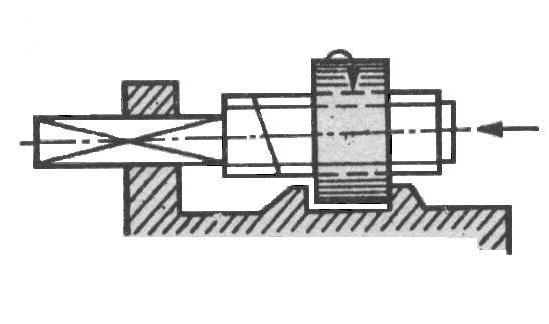
| obrót nakrętki – przesuw śruby |
 |
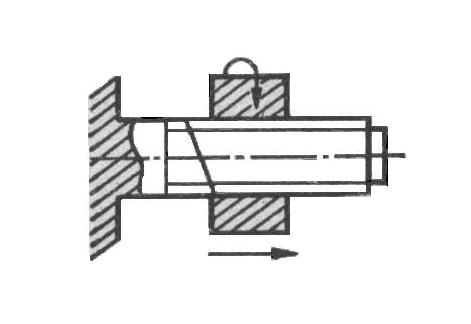
| obrót i przesuw nakrętki – śruba nieruchoma |
 |
Mechanizmy gwintowe służą do przetwarzania ruchu obrotowego na ruch postępowy, albo uzyskania ruchu śrubowego jednego ogniwa przy drugim ogniwie nieruchomym. Zależnie od rodzaju ogniwa napędowego (śruby lub nakrętki) i jego ruchu (obrotowy lub śrubowy) rozróżnia się cztery typy prostych mechanizmów gwintowych:
obrót śruby – przesuw nakrętki
obrót i przesuw śruby – nakrętka nieruchoma
obrót nakrętki – przesuw śruby
obrót i przesuw nakrętki – śruba nieruchoma
| obrót śruby – przesuw nakrętki |
|
| obrót i przesuw śruby – nakrętka nieruchoma |
|
| obrót nakrętki – przesuw śruby |
|
| obrót i przesuw nakrętki – śruba nieruchoma |
|
Niekiedy stosowane są złożone mechanizmy gwintowe składające się z trzech ogniw, przy czym ogniwo pośrednie ma dwa gwinty łączące je z ogniwem napędowym i pędzonym. Przy rożnym kierunku skrętu obu gwintów przesunięcia sumują się, a przy jednakowym odejmują. Stąd wynikają ich nazwy: mechanizm sumowy i różnicowy.
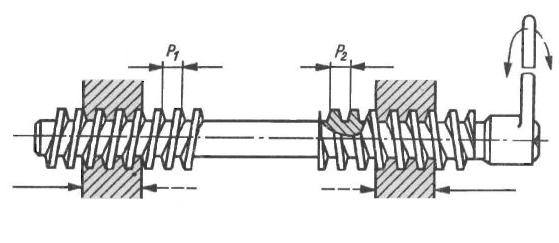 |
| mechanizm sumowy |
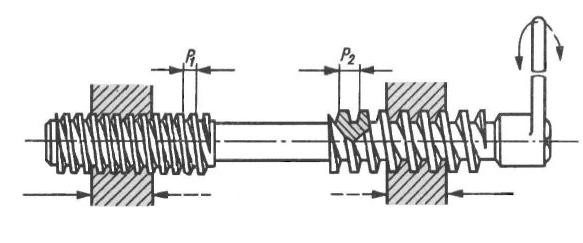 |
| mechanizm różnicowy |
Przykładem mechanizmu sumowego jest tzw. nakrętka rzymska z gwintami prawym i lewym na na obu końcach.
|
|
|
nakrętka rzymska |
Zaletą mechanizmów gwintowych jest prosta konstrukcja. Stosowane są przeważnie w napędach ręcznych, przenoszą niewielką moc. Stosowane jako mechanizmy pras lub podnośników śrubowych, sterowania zaworów, przesuwu suportu tokarki. Poniżej przykłady zastosowań mechanizmów gwintowych:
| Podnośnik śrubowy |
 |
| Prasa śrubowa |
 |
|
|
|
|
|
|
